TORCS Dataset Papers With Code
Por um escritor misterioso
Last updated 22 dezembro 2024

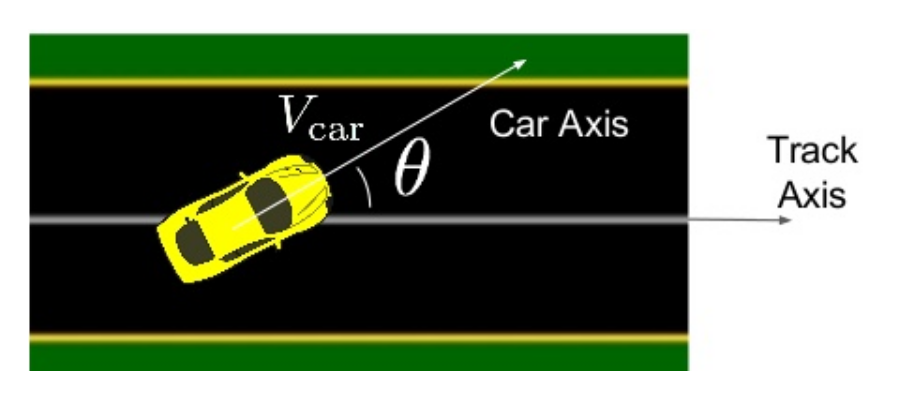
TORCS (The Open Racing Car Simulator) is a driving simulator. It is capable of simulating the essential elements of vehicular dynamics such as mass, rotational inertia, collision, mechanics of suspensions, links and differentials, friction and aerodynamics. Physics simulation is simplified and is carried out through Euler integration of differential equations at a temporal discretization level of 0.002 seconds. The rendering pipeline is lightweight and based on OpenGL that can be turned off for faster training. TORCS offers a large variety of tracks and cars as free assets. It also provides a number of programmed robot cars with different levels of performance that can be used to benchmark the performance of human players and software driving agents. TORCS was built with the goal of developing Artificial Intelligence for vehicular control and has been used extensively by the machine learning community ever since its inception.
Using Keras and Deep Deterministic Policy Gradient to play TORCS
PDF) Learning drivers for TORCS through imitation using supervised methods
PDF) Perspective, Survey and Trends: Public Driving Datasets and Toolsets for Autonomous Driving Virtual Test

PDF) Speed traffic sign detection on the CARLA simulator using YOLO

Newsletters Papers With Code

Sohan Rudra - Research Associate - Technische Universität Darmstadt

Drones, Free Full-Text

Pseudo-code of dynamic scheduling framework with grouped whales (DSF.GW)
Neural Networks in Python: From Sklearn to PyTorch and Probabilistic Neural Networks
Recomendado para você
-
 Auto racing - Wikipedia22 dezembro 2024
Auto racing - Wikipedia22 dezembro 2024 -
Open World Car Driving Games - Apps on Google Play22 dezembro 2024
-
![Driving Empire codes [December 2023]](https://assetsio.reedpopcdn.com/roblox-driving-empire.jpg?width=1200&height=1200&fit=bounds&quality=70&format=jpg&auto=webp) Driving Empire codes [December 2023]22 dezembro 2024
Driving Empire codes [December 2023]22 dezembro 2024 -
 Car Race Codes - Candy Update - Try Hard Guides22 dezembro 2024
Car Race Codes - Candy Update - Try Hard Guides22 dezembro 2024 -
 Super Kart Simulator Codes - 1.0.3 Freebies! - Droid Gamers22 dezembro 2024
Super Kart Simulator Codes - 1.0.3 Freebies! - Droid Gamers22 dezembro 2024 -
 Car Dealership Tycoon codes December 202322 dezembro 2024
Car Dealership Tycoon codes December 202322 dezembro 2024 -
 Speed Dreams - A free Open Motorsport Sim and Open Source Racing Game22 dezembro 2024
Speed Dreams - A free Open Motorsport Sim and Open Source Racing Game22 dezembro 2024 -
 Roblox Driving Empire codes (December 2023) – How to get free cash22 dezembro 2024
Roblox Driving Empire codes (December 2023) – How to get free cash22 dezembro 2024 -
 The Best Racing Games and the Wheels and Pedals to Play Them With22 dezembro 2024
The Best Racing Games and the Wheels and Pedals to Play Them With22 dezembro 2024 -
 ALL NEW *SECRET CODES* IN ROBLOX CAR RACE (all new secret codes in22 dezembro 2024
ALL NEW *SECRET CODES* IN ROBLOX CAR RACE (all new secret codes in22 dezembro 2024

você pode gostar
-
 Novo jogo grátis da Steam traz tiroteio com brinquedos estilo Toy22 dezembro 2024
Novo jogo grátis da Steam traz tiroteio com brinquedos estilo Toy22 dezembro 2024 -
 The Psychology of Trolling22 dezembro 2024
The Psychology of Trolling22 dezembro 2024 -
Replying to @High IQ Chess Magnus Carlsen TEACHES How to Crush the22 dezembro 2024
-
 COD 4: Modern Warfare - Call of Duty Maps22 dezembro 2024
COD 4: Modern Warfare - Call of Duty Maps22 dezembro 2024 -
 Full Game Unity Engine College Brawl Android & PC + Download22 dezembro 2024
Full Game Unity Engine College Brawl Android & PC + Download22 dezembro 2024 -
 PlayStation 2023 Showcase: Biggest Rumors, Leaks, and Predictions22 dezembro 2024
PlayStation 2023 Showcase: Biggest Rumors, Leaks, and Predictions22 dezembro 2024 -
Snake Retro Unblocked22 dezembro 2024
-
 roblox bedwars hackers - Imgflip22 dezembro 2024
roblox bedwars hackers - Imgflip22 dezembro 2024 -
 Leorio got that lightskin stare|TikTok Search22 dezembro 2024
Leorio got that lightskin stare|TikTok Search22 dezembro 2024 -
 Lilith Clawthorne Fan Casting22 dezembro 2024
Lilith Clawthorne Fan Casting22 dezembro 2024

